ME 218B
Upchuck

ME 218B Winter 2022
|
|
|
|
Phase 1
Conceptual Design
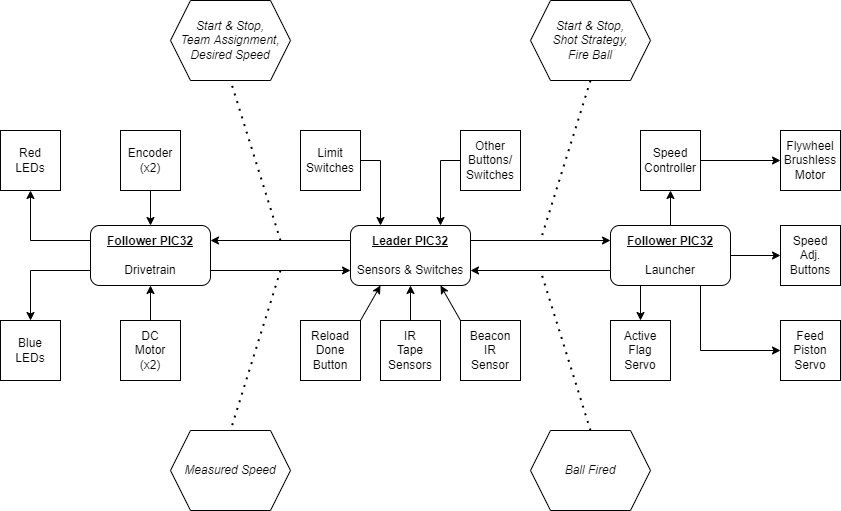
The team approached the project first by listing system requirements and brainstorming ideas. They then iterated through these ideas until a mature concept was agreed upon by all group members. Functional decomposition split up the system design into subsystems. The system requirements were further expanded to detail the requirements for each subsystem. Finally, to close out the conceptual design phase, the team created electrical schematics and state charts to detail the hardware and software interaction.
|
Phase 2
Rapid Prototyping
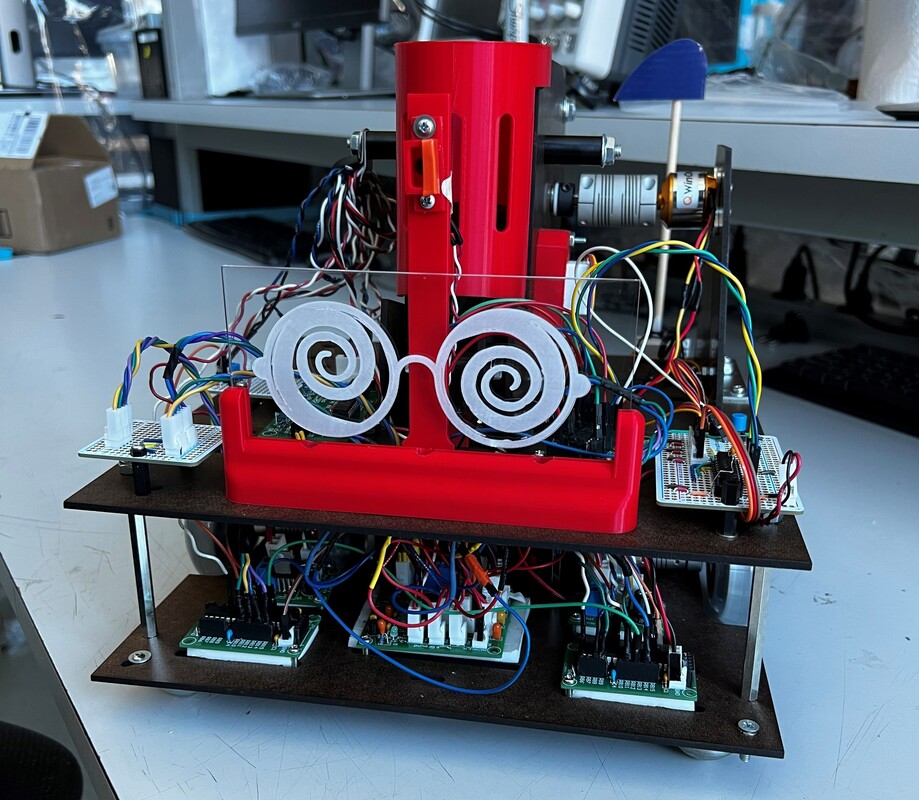
The robot was split into subsystems based on software functionality: leader, launcher, and drivetrain. The leader microcontroller and associated sensor circuitry were prototyped to detect the beacon and send commands via SPI to the launcher and drivetrain microcontrollers. The launcher was initially prototyped to control the speed of a brushless DC motor. Closer to later checkpoints, the mechanical part of the launcher was built and tested with the Skee-Balls. The drivetrain and control law were prototyped and tested with the skeleton structure to see how the robot would drive on its own.
|
Phase 3
Fabrication, Integration, and Testing
The team lasercut 1/8th inch Duron wood for the structure. Supports for most of the sensors and actuators were 3D Printed using PLA. The electrical components and associated software were integrated across PCBs and perfboards. During final testing, the forward and backward distances, speed of motor and RPM of flywheel were tuned such that we could shoot maximum 3 pointers during the game time.
|

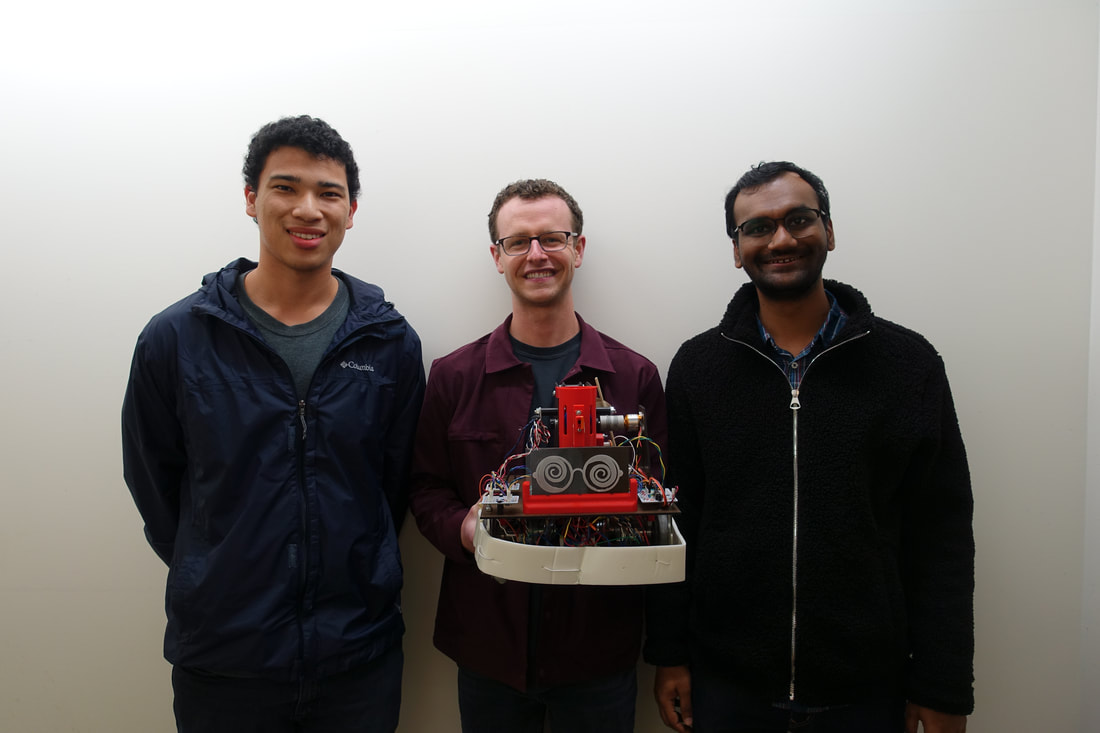
Aaron BrownSensor Sensei
|

Luke ArtztProjectile Enthusiast
|

Mahesh SabooDesignated Drive[train]er
|